

Wrote up the complete recipe for getting the Metis running on a real-time kernel alongside a ZED X stereo camera: in-tree driver (no OOT vermagic headaches), 49 fps yolov5s on 1080p at ~14% CPU, and a full sensor fusion sample running detection + GPU depth + point cloud + IMU pose + skeleton tracking concurrently at 46–53 fps — detector costs the GPU essentially zero.
Covers the ugly parts too: the DTBO trap, the PCIE_LINK_WAIT_MAX_RETRIES brownout fix, the GST_PLUGIN_FEATURE_RANK workaround for file/RTSP sources, and vermagic discipline end to end.
All numbers are live measurements on the reference unit, not projections.
Full article (free link, no paywall):https://medium.com/@silicondoritos/jetson-metis-zed-x-inference-on-a-real-time-kernel-ee49c17b5c6f?source=friends_link&sk=d255fc3135f4527de57f606a95a54cb6
Repo (Apache 2.0) — make ignite gets you from zero to flashed: https://github.com/silicondoritos/jetson-rt-stack
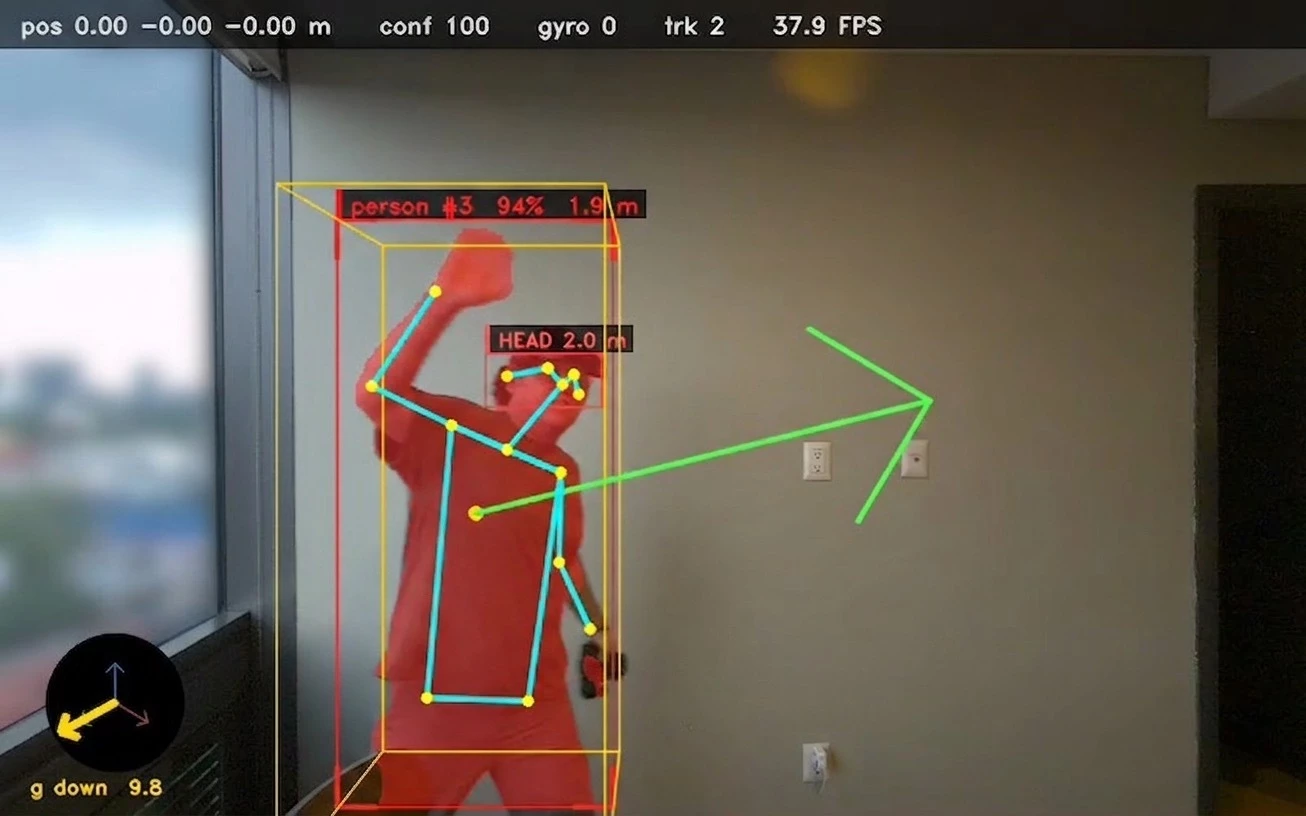
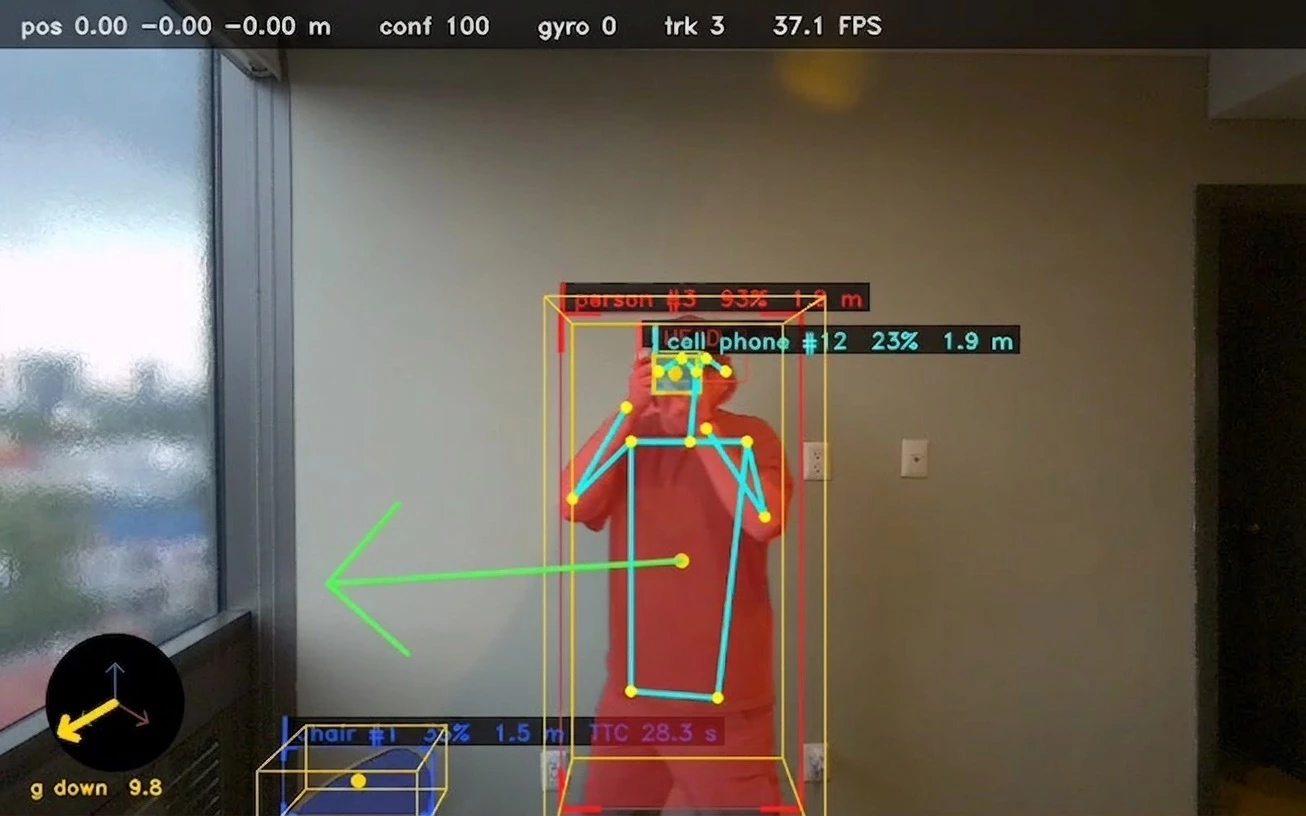
There you can see the sample application showing the stuff you can do with the metis running yolo8l and the zedx camera sdk. You can see the labels, distances, boxes, the arrow showing the calculated direction of the object and the 3D volumes for detected objects. All in real time.
Happy to answer questions here or in the repo issues.