Hi all!
I’m happy to be aboard the Smarter Spaces Challenge!
MotionFlow turns one (or several) RTSP cameras into a privacy-preserving activity sensor for the smart home. Instead of “motion / no motion” that PIR sensors provide, it tries to answer the more useful questions: Is someone sitting at the desk? Walking through a room? Lying down on the couch?
What it does
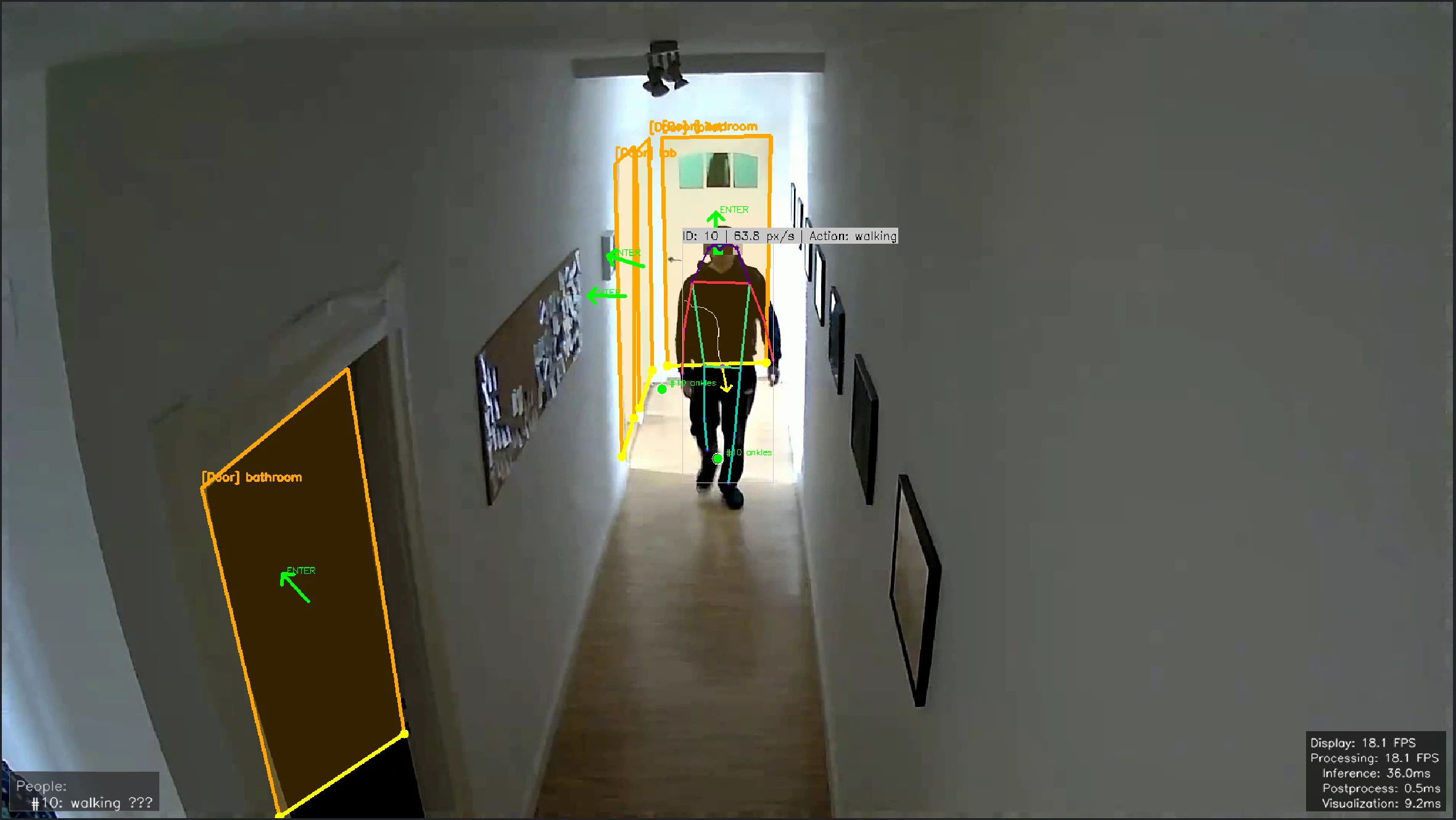
Each camera stream runs through a lightweight pipeline on the edge:
- Pose estimation on each frame
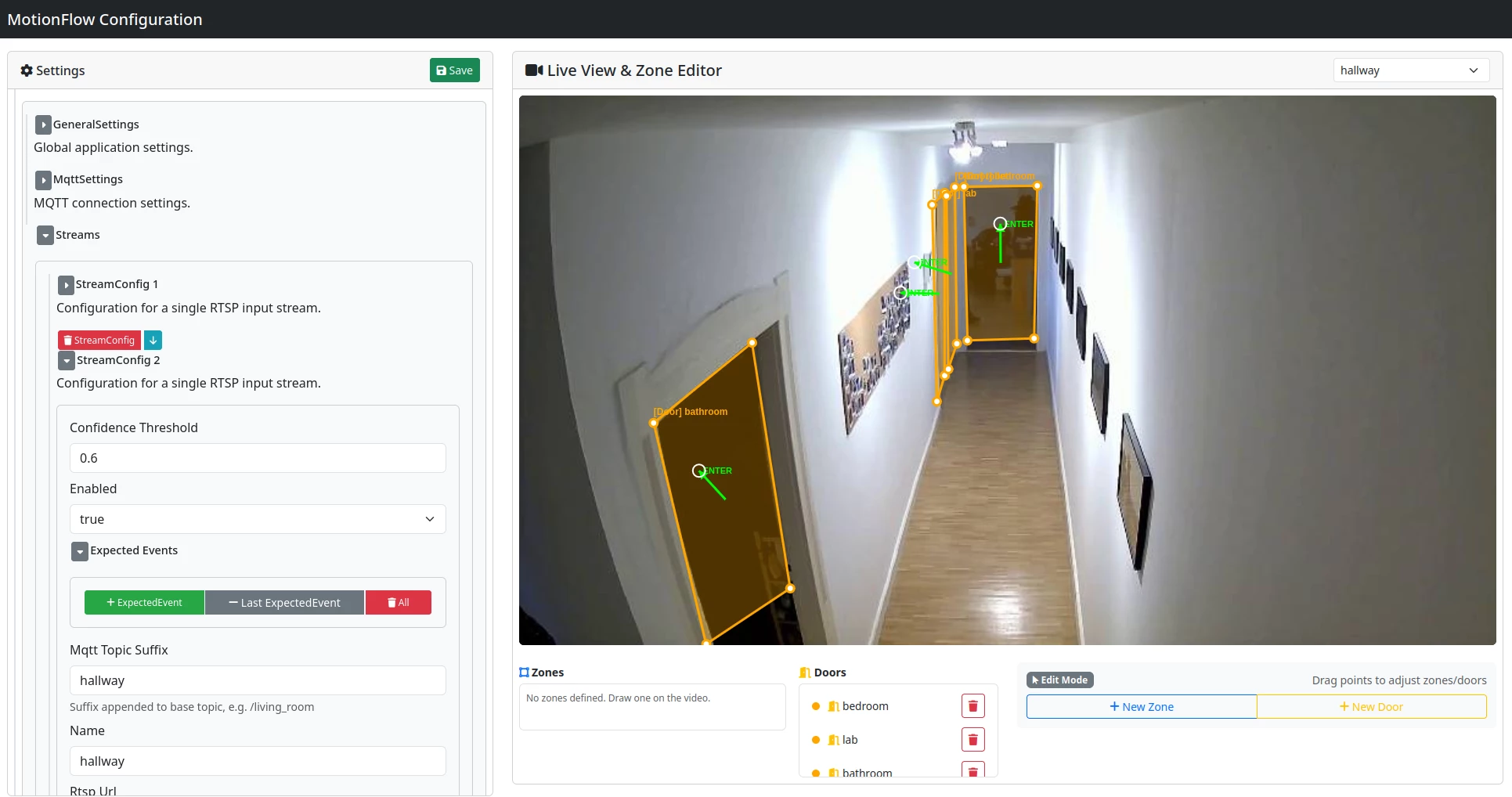
- Zones to map “where” persons are (e.g., couch area, desk, hallway).
- Activity classification from the keypoint geometry (angles, ratios, posture).
- MQTT events as the output so Home Assistant / Node-RED can react (lights, scenes, etc.).
Why I’m building it
I’ve been running home automation for a while, and presence sensing is still very limited: PIR loses you when you sit still, and many camera solutions assume cloud processing.
MotionFlow aims for a practical middle ground: richer context than standard sensors, while keeping video local and publishing only simple state.
System sketch
RTSP Cameras → Pose → Activity + Zone Logic → MQTT → Home Automation
Currently, I'm setting up a local test system on my laptop, while waiting for the hardware to arrive.
A basic setup is already running, consisting of a RTSP server (mediamtx docker) providing dummy videos and a first application draft that consumes the RTSP streams and pre-processes them for inference.
Next up is getting a pose model running (probably YOLOv11) - I'll keep you updated!
Looking forward to seeing what everyone is building!
- Jonathan