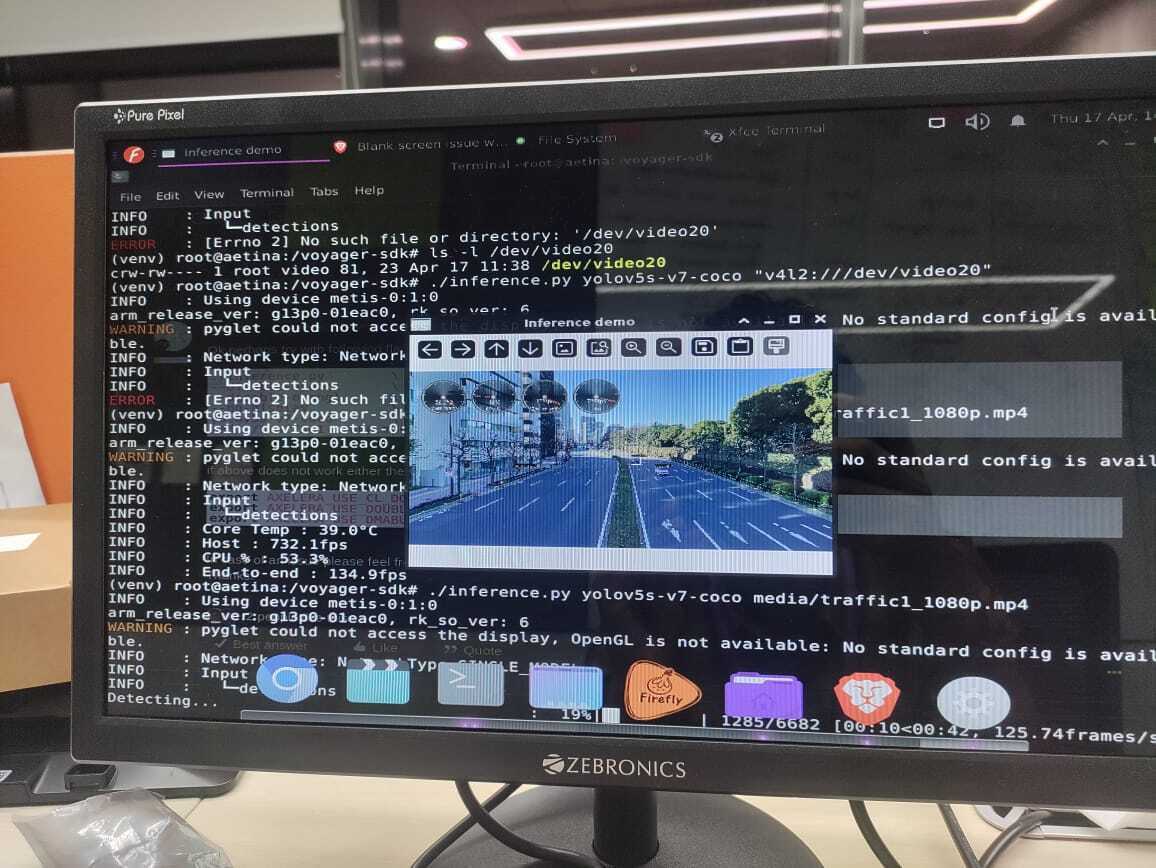
i am using Metis M.2 Eval System with Aetina RK3588 Industrial Motherboard . i connected everything to it keyboard, monitor and mouse and power supply . the monitor is showing blank screen . but yesterday it is working . why it is not working now . is there any solution.